#include <OmniRobot.h>
Definition at line 53 of file OmniRobot.h.
| OmniRobot::OmniRobot |
( |
void |
| ) |
|
Default constructor.
- Author
- Frederick Wachter
- Date
- Created: 2018-03-06
Definition at line 15 of file OmniRobot.cpp.
| void OmniRobot::displayRCChannels |
( |
void |
| ) |
|
Displays all the values from the RC controller.
- Author
- Frederick Wachter
- Date
- Created: 2018-03-06
Definition at line 81 of file OmniRobot.cpp.
| void OmniRobot::displayRobotState |
( |
void |
| ) |
|
Displays the robot state.
- Author
- Frederick Wachter
- Date
- Created: 2018-03-06
Definition at line 72 of file OmniRobot.cpp.
| void OmniRobot::runRobotModel |
( |
void |
| ) |
|
Executes the robot model based on input from the RC controller.
- Author
- Frederick Wachter
- Date
- Created: 2018-03-06
Definition at line 27 of file OmniRobot.cpp.
| void OmniRobot::updateLED |
( |
void |
| ) |
|
Updates LED colors based on robot state.
- Author
- Frederick Wachter
- Date
- Created: 2018-03-06
Definition at line 93 of file OmniRobot.cpp.
| void OmniRobot::updateRCChannels |
( |
void |
| ) |
|
Updates the RC controller values.
- Author
- Frederick Wachter
- Date
- Created: 2018-03-06
Definition at line 87 of file OmniRobot.cpp.
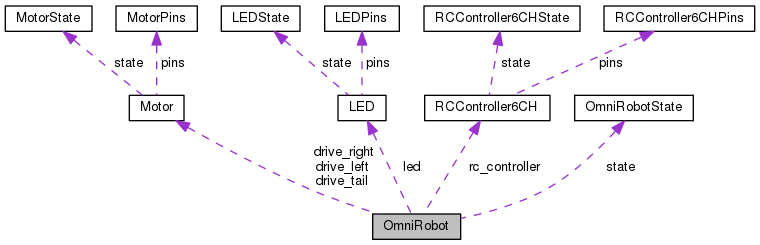
| Motor OmniRobot::drive_left |
|
protected |
| Motor OmniRobot::drive_right |
|
protected |
| Motor OmniRobot::drive_tail |
|
protected |
| bool OmniRobot::ready = false |
The documentation for this class was generated from the following files: