Header file for OmniRobot class More...
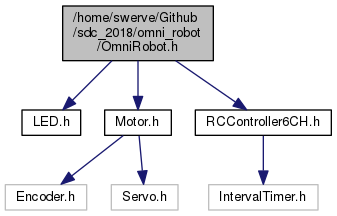
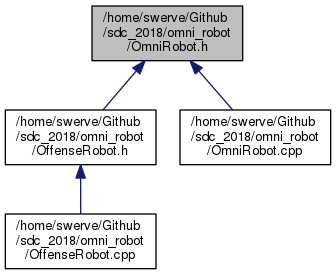
Go to the source code of this file.
Classes | |
| struct | OmniRobotState |
| class | OmniRobot |
Macros | |
| #define | PIN_PWM_LEFT 2 |
| #define | PIN_PWM_RIGHT 3 |
| #define | PIN_PWM_TAIL 4 |
| #define | PIN_A_TAIL 33 |
| #define | PIN_B_TAIL 34 |
| #define | PIN_A_RIGHT 35 |
| #define | PIN_B_RIGHT 36 |
| #define | PIN_A_LEFT 37 |
| #define | PIN_B_LEFT 38 |
| #define | PIN_CH_1 27 |
| #define | PIN_LEFT_RED 9 |
| #define | PIN_LEFT_GREEN 8 |
| #define | PIN_LEFT_BLUE 10 |
| #define | PIN_RIGHT_RED 22 |
| #define | PIN_RIGHT_GREEN 23 |
| #define | PIN_RIGHT_BLUE 21 |
| #define | SPEED_MIN 0 |
| #define | SPEED_MAX 100 |
| #define | DEAD_ZONE 10 |
| #define | SPIN_GAIN 0.3 |
Functions | |
| void | updateController (void) |
Detailed Description
Macro Definition Documentation
| #define DEAD_ZONE 10 |
Definition at line 38 of file OmniRobot.h.
| #define PIN_A_LEFT 37 |
Definition at line 24 of file OmniRobot.h.
| #define PIN_A_RIGHT 35 |
Definition at line 22 of file OmniRobot.h.
| #define PIN_A_TAIL 33 |
Definition at line 20 of file OmniRobot.h.
| #define PIN_B_LEFT 38 |
Definition at line 25 of file OmniRobot.h.
| #define PIN_B_RIGHT 36 |
Definition at line 23 of file OmniRobot.h.
| #define PIN_B_TAIL 34 |
Definition at line 21 of file OmniRobot.h.
| #define PIN_CH_1 27 |
Definition at line 27 of file OmniRobot.h.
| #define PIN_LEFT_BLUE 10 |
Definition at line 31 of file OmniRobot.h.
| #define PIN_LEFT_GREEN 8 |
Definition at line 30 of file OmniRobot.h.
| #define PIN_LEFT_RED 9 |
Definition at line 29 of file OmniRobot.h.
| #define PIN_PWM_LEFT 2 |
Definition at line 16 of file OmniRobot.h.
| #define PIN_PWM_RIGHT 3 |
Definition at line 17 of file OmniRobot.h.
| #define PIN_PWM_TAIL 4 |
Definition at line 18 of file OmniRobot.h.
| #define PIN_RIGHT_BLUE 21 |
Definition at line 34 of file OmniRobot.h.
| #define PIN_RIGHT_GREEN 23 |
Definition at line 33 of file OmniRobot.h.
| #define PIN_RIGHT_RED 22 |
Definition at line 32 of file OmniRobot.h.
| #define SPEED_MAX 100 |
Definition at line 37 of file OmniRobot.h.
| #define SPEED_MIN 0 |
Definition at line 36 of file OmniRobot.h.
| #define SPIN_GAIN 0.3 |
Definition at line 39 of file OmniRobot.h.
Function Documentation
| void updateController | ( | void | ) |
